| Ms. Liên |


|
 lien.ans@ansvietnam.com lien.ans@ansvietnam.com
|
|
 0902937088 0902937088
|
|
| Mr. Hương |
|
|
huong@ansgroup.asia
|
|
|
0984359334
|
|

|
Đang online | 4 |

|
Lượt truy cập | 122813 |
Máy bơm là một thiết bị di chuyển chất khí hoặc chất lỏng từ khu vực này sang khu vực khác. Điều này có thể được thực hiện bằng cách tăng tốc chất lỏng bằng cách sử dụng lực ly tâm (máy bơm ly tâm / quay động lực học) hoặc bằng cách lấy một lượng chất lỏng nhất định và đẩy nó về phía nơi cần đến (máy bơm dịch chuyển tích cực). Máy bơm có lẽ là thiết bị cơ khí được sử dụng rộng rãi nhất và thiết kế của chúng cũng khác nhau tùy theo ứng dụng của chúng.
Các tùy chọn giám sát bơm ly tâm
| 440 Công tắc với cảm biến bên ngoài Cung cấp các tiếp điểm cục bộ cũng như đầu ra 4-20mA cho giao diện với PLC. Cảm biến được đặt trên máy bơm trong khi công tắc 440 được đặt trong một môi trường thân thiện hơn với điện tử. |
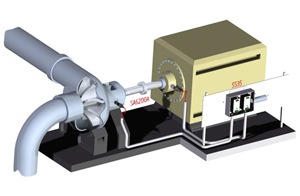
SA6200A và 5535 Cung cấp đầu ra 4-20mA cho giao diện với PLC / DCS. Tín hiệu động có sẵn từ bảng điều khiển phía trước cho mục đích phân tích rung động. Cung cấp các tùy chọn cho các bộ lọc tùy chỉnh, hiển thị / chỉ báo cục bộ hoặc cách ly điện. |
 |
 |
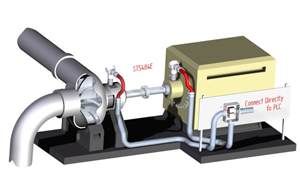
| ST5484E / ST5491E ST5484E cung cấp cho việc cài đặt đơn giản nhất hiện có. Vì đây là thiết bị được cấp nguồn theo vòng lặp nên chỉ cần hai dây để hoạt động đầy đủ. ST5484E được kết nối trực tiếp với PLC / DCS. Lọc tùy chọn và đầu ra động có sẵn. ST5491E có màn hình hiển thị cục bộ. |
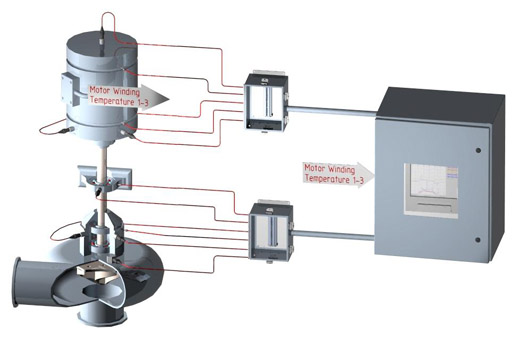
Trường hợp đặc biệt - Máy bơm dạng đứng lớn Metrix cung cấp cảm biến rung cho tất cả các ổ trục và màn hình Datawatch. Datawatch giám sát tất cả các chỉ số rung động và nhiệt độ và so sánh chúng với các điểm đặt được lập trình trước để thay đổi trạng thái đầu ra của rơle cảnh báo và nguy hiểm. |
 |
 |
|
Trường hợp đặc biệt - Máy bơm có ổ đỡ trục Điều này làm cho nó cần thiết để sử dụng cảm biến tiệm cận để phát hiện lỗi trục. Một đầu dò gần được gắn qua vỏ của máy và cảm nhận vị trí của trục so với đầu của đầu dò. Vỏ máy bơm giữ cố định đầu dò sao cho bất kỳ chuyển động nào trong trục sẽ làm cho đầu dò / máy phát ở gần đưa ra chỉ báo. Loại phép đo này được gọi là "tương đối" vì chuyển động của trục được đo liên quan đến vỏ máy. |
 |





